|
Jinwoo Choi Hi! I'm a Ph.D. student in the Department of Electrical and Computer Engineering at Seoul National University, advised by Prof. Seung-Woo Seo and affiliated with the Vehicle Intelligence Lab. I received my B.S. from the Department of Electronic Engineering at Hanyang University. My research focuses on autonomous driving and robotics, with an emphasis on offline reinforcement learning for long-horizon tasks. I aim to develop learning-based agents that can make reliable decisions from previously collected data, reason over extended temporal horizons, and generalize to complex real-world environments. CV / Email / Google Scholar / X / LinkedIn |

|
Publications |
|
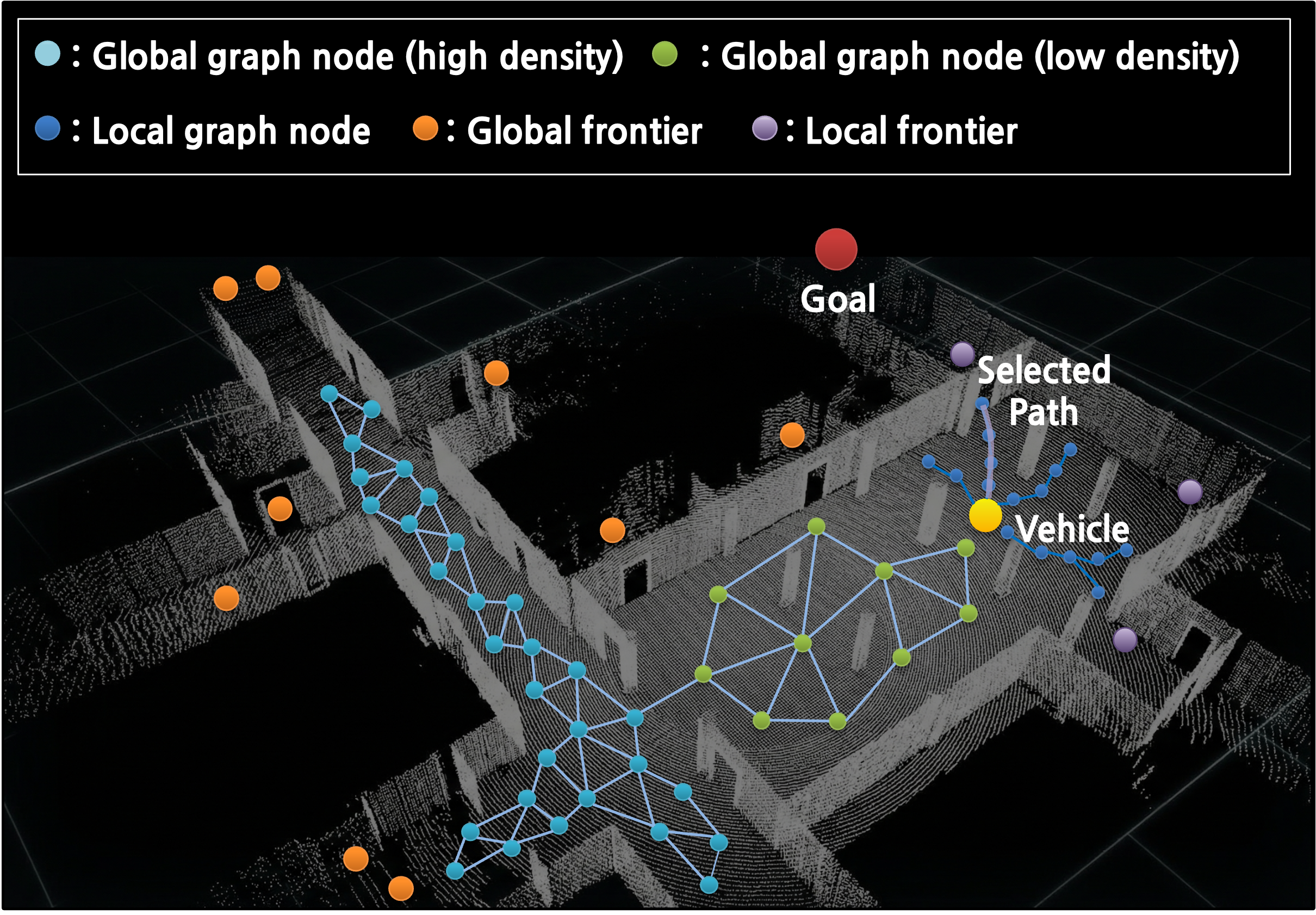
FPAS: Frontier-Based Path Planning with Adaptive Sampling for Large-Scale Unknown Environments
Jinwoo Choi, Yeonkyu Lee, Jung-Taak Kim, Jisung Bae, Seung-Woo Seo IROS, 2026 |
|
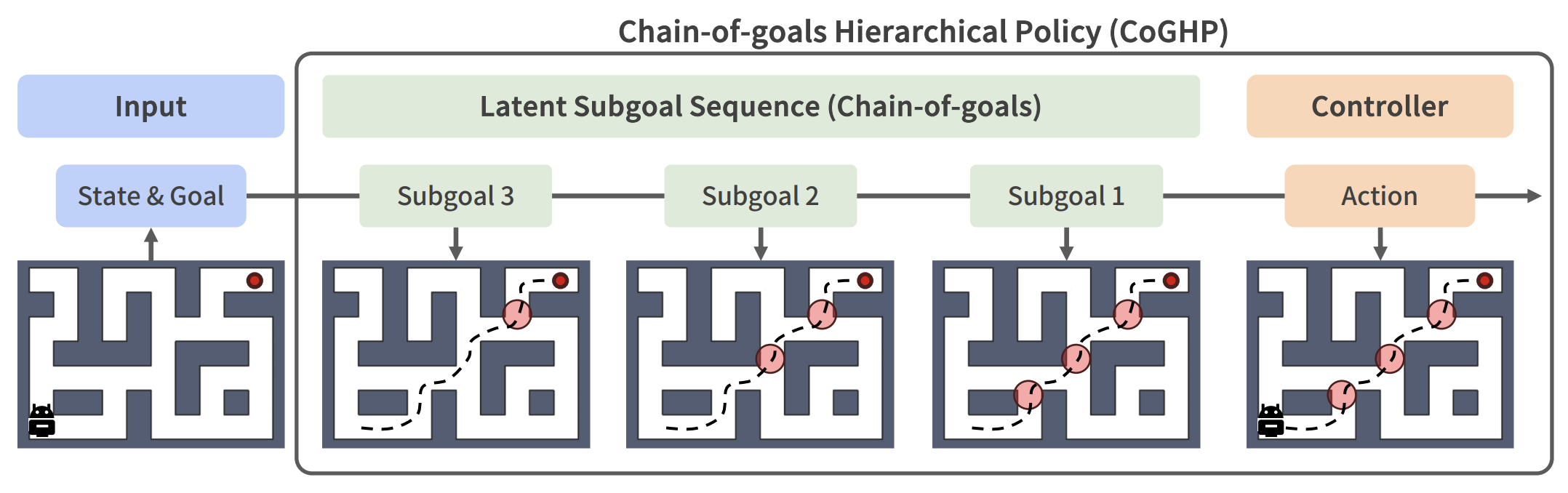
Chain-of-Goals Hierarchical Policy for Long-Horizon Offline Goal-Conditioned RL
Jinwoo Choi, Sang-Hyun Lee, Seung-Woo Seo ICML, 2026 paper | code | project page |
|
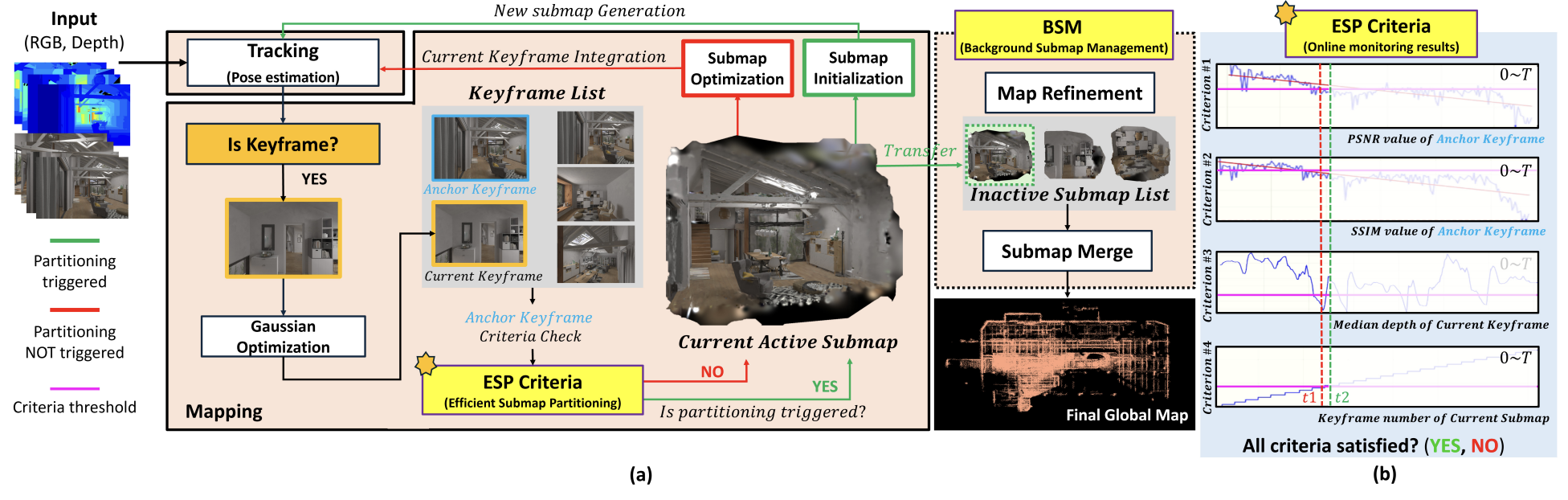
ESP-SLAM: Efficient Submap Partitioning for Large-Scale 3D Gaussian Splatting-Based SLAM
Jisung Bae, Hwichang Kim, Jinwoo Choi, Ji-Hoon Hwang, Dong-Wook Kim, Kun Park, Seung-Woo Seo IEEE Robotics and Automation Letters (RA-L), 2026 paper |
|
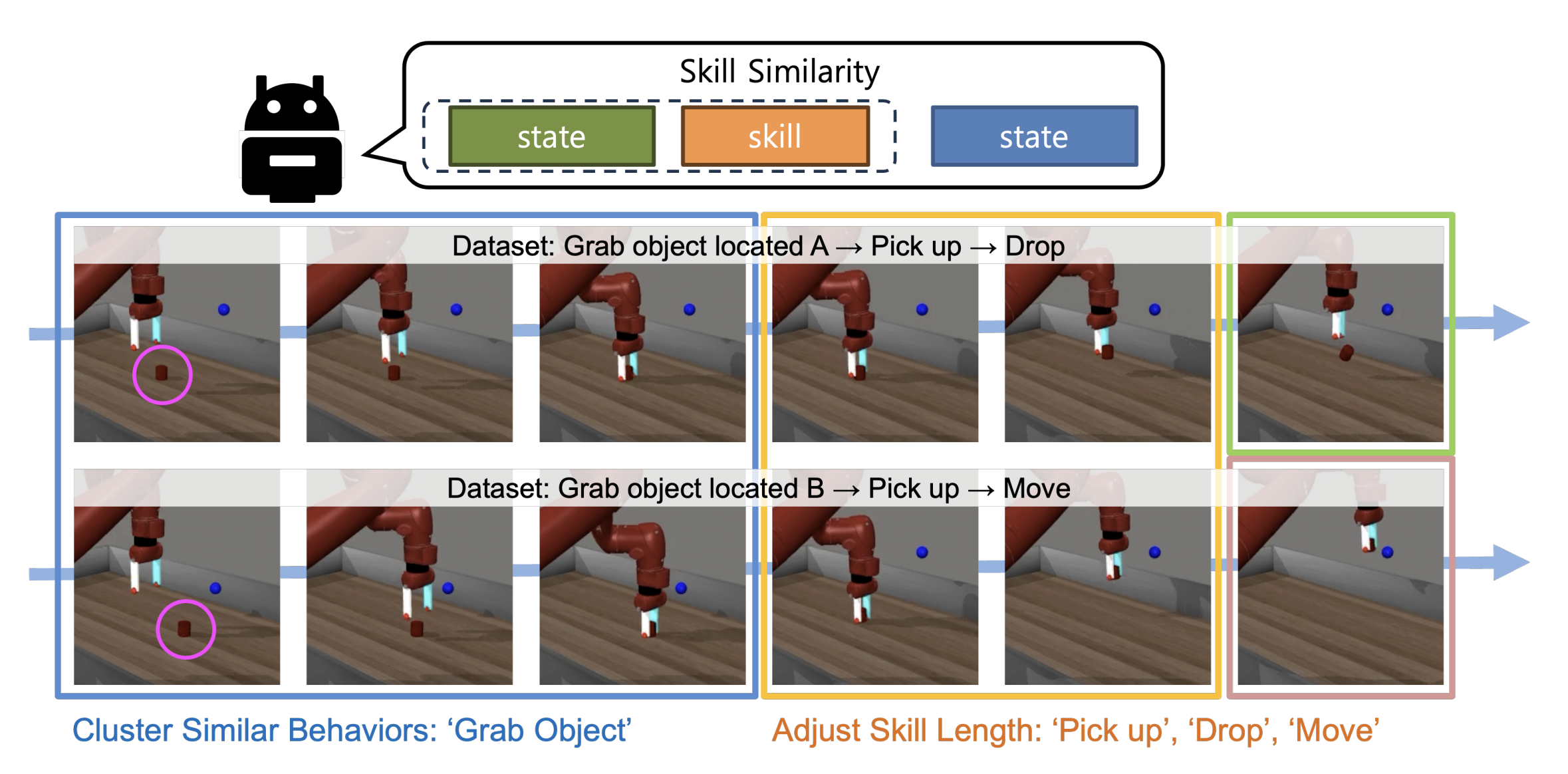
Dynamic Contrastive Skill Learning with State-Transition Based Skill Clustering and Dynamic Length Adjustment
Jinwoo Choi, Seung-Woo Seo ICLR, 2025 paper | project page |
|
GIN: Graph-based interaction-aware constraint policy optimization for autonomous driving
Se-Wook Yoo, Chan Kim, Jinwoo Choi, Seong-Woo Kim, Seung-Woo Seo IEEE Robotics and Automation Letters (RA-L), 2022 paper | code |
|
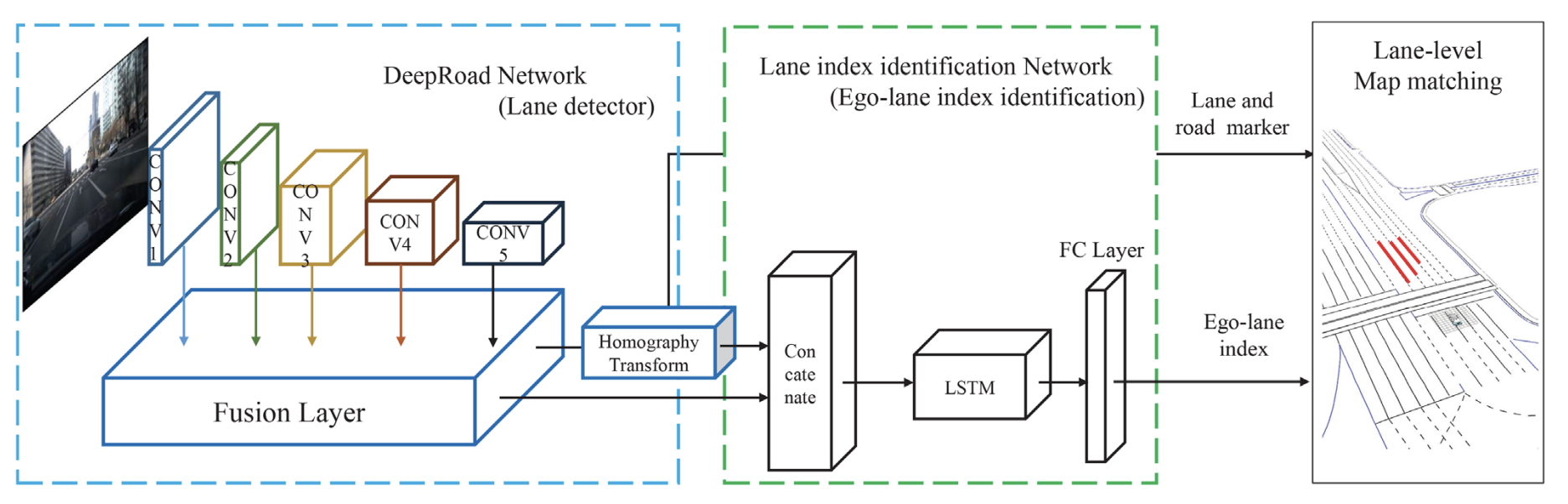
Ego‐lane index‐aware vehicular localisation using the DeepRoad Network for urban environments
Soomok Lee, Jinwoo Choi, Seung-Woo Seo IET Intelligent Transport Systems, 2021 paper |
ProjectsHover over an image to play the video. On mobile, tap an image. |

|
VISKY: Mobile Robot for Autonomous Exploration in Unstructured Environments
Role: Project Manager, Global Path Planning (Jan 2022 - Jun 2023) VISKY is a mobile robot developed for autonomous exploration in unknown, unstructured, and hazardous environments as part of the Challengeable Future Defense Technology Research and Development Program funded by the Agency for Defense Development (ADD). Built on robust perception, accurate SLAM, and real-time path replanning, my work focused on global path planning for goal-reaching in unexplored areas. |
|
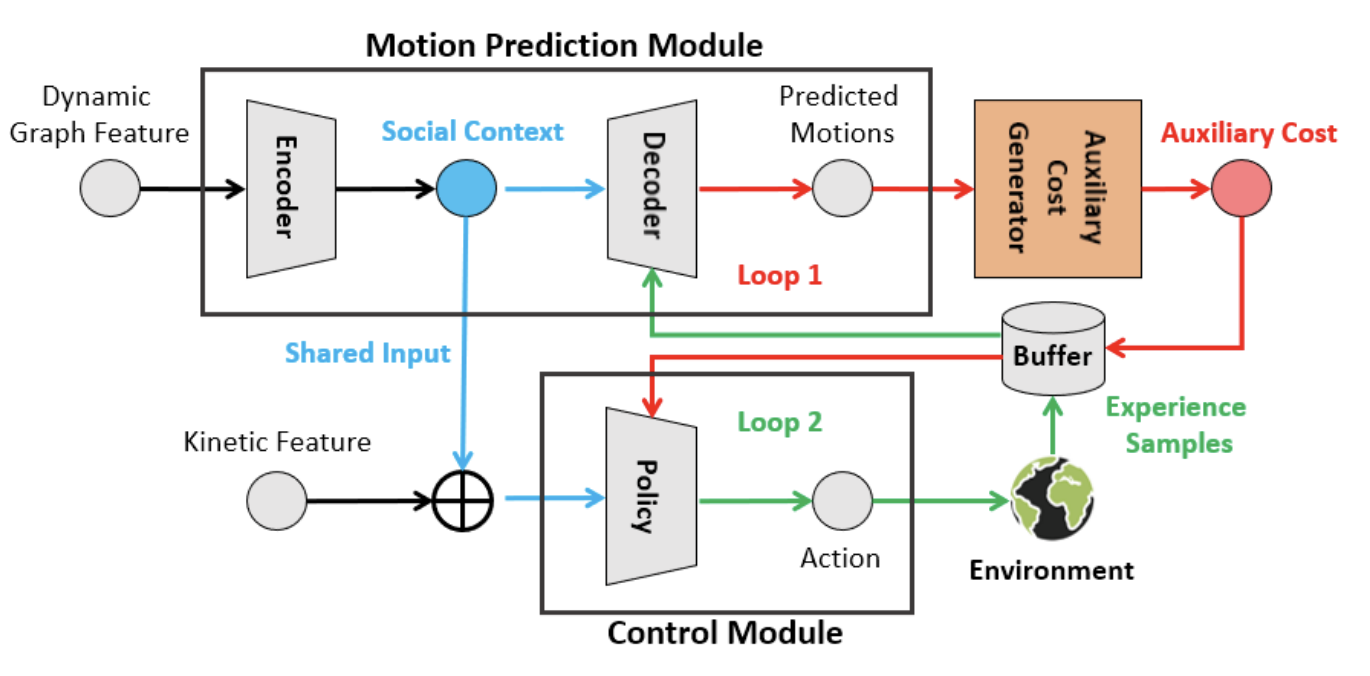
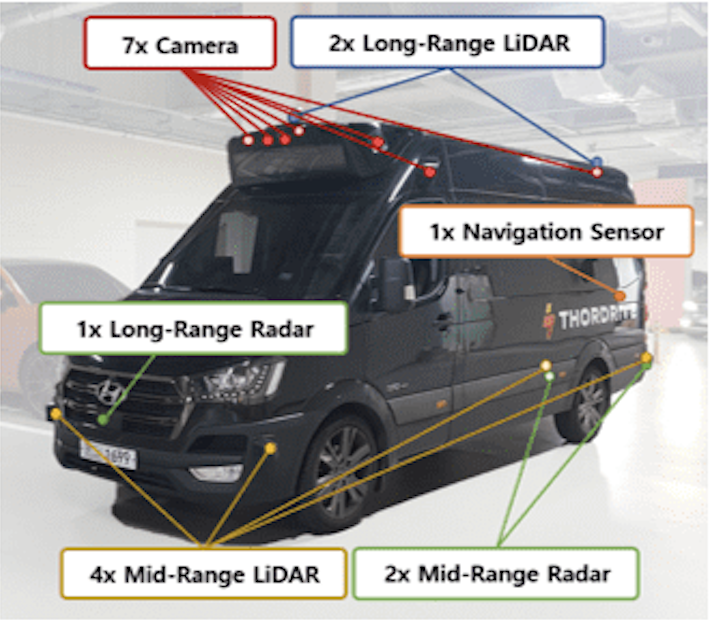
Reinforcement Learning for Autonomous Driving Decision Making
Role: Research Intern at ThorDrive, High-Level Decision Making (Aug 2021 - Oct 2021) Developed a hybrid high-level decision-making module for autonomous driving toward real-vehicle deployment, combining rule-based and reinforcement learning-based approaches for lane changes and detours. Built CARLA scenarios with illegally parked vehicles and developed an RL-based algorithm to select candidate paths in lane-change and detour situations. |

|
SNUVI: Autonomous Vehicle for Urban Driving
Role: Team Leader, Local Path Planning (Jul 2020 - Feb 2021) SNUVI is an autonomous vehicle developed for urban driving. It integrates precise perception, localization, and decision-making systems to handle pedestrians, traffic, and road rules, and was evaluated in diverse urban scenarios at K-City (a national autonomous driving testbed) in South Korea. |
|
|